1G r ü n d e:
2I.
3Die Klägerin ist eingetragene Inhaberin des deutschen Teils des in deutscher Verfahrenssprache erteilten Europäischen Patents NR. … („Klagepatent“, Anlage K1; vgl. Registerauszug des Deutschen Patent- und Markenamts, Anlage K2). Die Anmeldung des Klagepatents erfolgte am 20.03.2008 unter Inanspruchnahme des Prioritätsdatums 05.04.2007 der DE ..., die Veröffentlichung der Anmeldung am 16.12.2009. Die Erteilung des Klagepatents wurde vom Europäischen Patentamt am 24.06.2015 veröffentlicht.
4Der hier geltend gemachte Anspruch 1 des Klagepatents steht in Kraft. Mit Urteil vom 08.02.2018 (Blatt 279 ff. GA) erklärte das Bundespatentgericht lediglich den Patentanspruch 9 des Klagepatents für nichtig und wies die von der A. (= Beklagte im parallelen Verletzungsverfahren (Az.: I-15 U 11/18)) erhobene Nichtigkeitsklage (Anlagenkonvolut B&B 2) gegen das Klagepatent im Übrigen zurück. Über die gegen diese Entscheidung („BPatGU“) beim Bundesgerichtshof (Az: X ZR 111/18) eingereichte Berufung (Anlage B&B 5) ist bislang noch keine Entscheidung ergangen.
5Der Anspruch 1 des Klagepatents hat folgenden Wortlaut:
6“Drehratensensor zur Detektion einer Drehung Ω, um die der Sensor gedreht wird,
7wobei der Sensor ein Substrat und eine Antriebs- und Detektionsanordnung aufweist, die sich im Wesentlichen flächig in einer x-y-Ebene oberhalb der Substratoberfläche befindet,
8wobei die Antriebs- und Detektionsanordnung eine Antriebsmasse (4) und eine Detektionsmasse (3) aufweist, die in unterschiedlichen Abständen von einem Zentrum (Z) der Detektionsanordnung symmetrisch um dieses Zentrum herum angeordnet sind und deren Schwingungsmoden teilweise aufeinander übertragen werden können und teilweise entkoppelt sind,
9wobei die Drehung Ω dadurch detektiert wird, dass eine Verkippung der Detektionsmasse aus der Flächenebene der Antriebs- und Detektionsanordnung heraus detektiert wird, wobei diejenige der beiden Massen (3,4), die einen größeren Abstand zu dem genannten Zentrum aufweist, unter der Einwirkung von Corioliskraft aus der genannten Flächenebene heraus verkippen kann,
10dadurch gekennzeichnet, dass die genannte verkippbare Masse (3,4) über symmetrisch angeordnete Außenanker (7) mit dem Substrat derart verbunden ist, dass die Rückstellung der genannten Verkippung durch die Außenanker (7) unterstützt wird.”
11Die nachstehend (verkleinert) eingeblendete Figur 2 des Klagepatents illustriert exem-plarisch die technische Lehre des Klagepatents:
12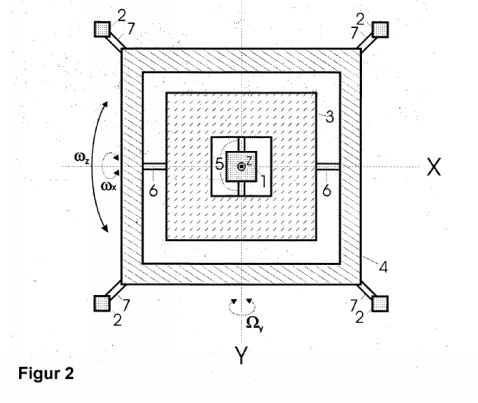
13Die Beklagte, ein US-amerikanisches Unternehmen, verfügt über eine Zweigniederlassung mit Sitz in München. Sie präsentiert auf ihrer in deutscher Sprache gehaltenen Webseite (www…...com) Gyroskope der Herstellerin A. mit den Artikelbezeichnungen „NR.001“ und „NR.002“.
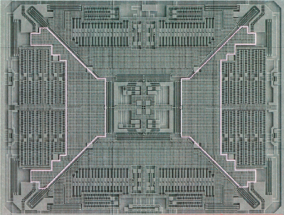
14Die nachstehend eingeblendeten Aufnahmen zeigen die angegriffene Ausführungsform NR.001. Hier sind die (jeweils zwei) Antriebsmassen gelb und die Detektionsmassen rosa umrandet (vgl. S. 24 der Klageschrift):
15 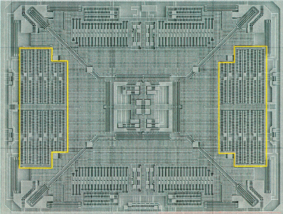
16Bei den angegriffenen Ausführungsformen werden Antriebsmassen über Fingerelektroden in eine translatorische Oszillation längs der X-Achse angeregt. Mittels Federn wird diese Oszillation auf die weiter innen liegenden Detektionsmassen übertragen. Beide Massen verkippen unter Einwirkung der Corioliskraft aus der X-Y-Ebene.
17Die Klägerin hat die Beklagte (sowie die C.-GmbH als Beklagte zu 2) erster Instanz) vor dem Landgericht auf Unterlassung, Auskunft und Rechnungslegung sowie auf Feststellung der Schadensersatzverpflichtung in Anspruch genommen: Die angegriffenen Ausführungsformen machten wortsinngemäßen Gebrauch von der technischen Lehre des Anspruchs 1 des Klagepatents.
18Die Beklagte hat ist dem Verletzungsvorwurf entgegen getreten. Jedenfalls sei der Rechtsstreit mit Blick auf das von der Herstellerin angestrengte Nichtigkeitsverfahren auszusetzen.
19Wegen der weiteren Einzelheiten des Sach- und Streitstandes erster Instanz wird gem. § 540 Abs. 1 Nr. 1 ZPO auf das angefochtene Urteil der 4a. Zivilkammer des Landgerichts Düsseldorf vom 14.12.2017 (Az. 4a O 75/16; „LGU“) Bezug genommen, mit dem es die Klage abgewiesen hat. Zur Begründung hat das Landgericht im Wesentlichen ausgeführt:
20Die angegriffenen Ausführungsformen machten von der technischen Lehre des Anspruchs 1 des Klagepatents keinen Gebrauch. Mit Blick auf die primäre Verletzungsargumentation der Klägerin mangele es an „teilweise entkoppelten“ Schwingungsmoden. Hierfür sei eine zumindest technisch relevante Entkopplung erforderlich. Auch die hilfsweise Verletzungsargumentation der Klägerin greife nicht durch: Zum angeblichen Abstand der Detektionsmasse vom Zentrum (Z) der Detektionsanordnung habe die Klägerin nicht hinreichend konkret vorgetragen. Überdies sei im Rahmen der hilfsweisen Verletzungsargumentation der Klägerin nicht feststellbar, dass das Merkmal 2.1 gemäß der unten wiedergegebenen Merkmalsgliederung erfüllt sei. Überdies mangele es an der erforderlichen gleichzeitigen Verwirklichung der Merkmale 3 und 4.
21Mit ihrer form- und fristgerecht eingelegten und begründeten Berufung macht die Klägerin im Wesentlichen geltend: Das Landgericht habe das Klagepatent teilweise unzutreffend ausgelegt. Soweit das Landgericht unterstellt habe, dass die Verkippung der äußeren Masse aufgrund der Einwirkung von Corioliskraft erforderlich sei, um die Drehrate per Verkippung der Detektionsmasse messen zu können, sei dies nur im Hinblick auf solche Konstellationen richtig, bei denen entweder die Detektionsmasse oder die Antriebsmasse außenliege, letztere aber nicht die Primärschwingung übertrage, wohl aber die Sekundärschwingung. Anders liege es in der ebenfalls vom Anspruchswortlaut 1 umfassten weiteren Gestaltung, bei der die außenliegende Antriebsmasse ihre Primärschwingung übertrage und somit die innenliegende Detektionsmasse „autonom“ - d.h. unabhängig von der Sekundärschwingung der Antriebsmasse - verkippe. Die technische Lehre des Klagepatents sei nicht auf die im Absatz [0033] angeführten Ausführungsbeispiele beschränkt, sondern ziele im Gegenteil auf vielfältige Ausgestaltungsformen ab. Zutreffend habe das Landgericht angenommen, dass eine vollständige Entkopplung in Bezug auf eine der beiden Schwingungsmoden nicht notwendig sei. Eine anspruchsgemäße teilweise Entkopplung liege vor, wenn die beiden Massen die beiden Schwingungsmoden nicht identisch ausführten, d.h. nicht mit der gleichen Stärke schwingen. Soweit das Landgericht allerdings einschränkend bemerkt habe, dass die entkoppelte Masse weniger stark schwinge, sei dies zu eng: Eine teilweise Entkopplung liege auch vor, wenn die entkoppelte Masse mit einer größeren Amplitude, also stärker schwingen könne als die Antriebsmasse. Das Landgericht habe zu Unrecht das Merkmal 2.2 gemäß der Merkmalsgliederung im LGU nicht als verwirklicht angesehen, weil - so das Landgericht - die Detektionsmasse stärker verkippe als die Antriebsmasse. Mit Blick auf ihre primäre Verletzungsargumentation macht die Klägerin geltend: Da die mittlere Feder in der Bewegungsrichtung der primären Schwingungsmode eine extrem große Steifigkeit aufweise, komme es zu einer nahezu vollständigen Übertragung der Bewegung in diese Richtung; demgegenüber sei diese Feder hinsichtlich zur X-Achse parallelen Bewegungen (Ablenkungen aus der x-y-Ebene heraus) flexibel. Der Amplitudenunterscheid liege im zweistelligen Prozentbereich. Die Flexibilität dieser Feder und die da-raus resultierende Reduzierung der Übertragung der Sekundärschwingung räume die Beklage auch im Grundsatz ein. Dass die beiden Massen unterschiedlich stark verkippen könnten und im eigentlichen Sensorbetrieb in der Praxis entsprechend auch unterschiedlich stark verkippten, beruhe auf mehreren Faktoren, und zwar der unterschiedlichen Steifigkeit der Verankerung der Massen am Substrat, dem Einfluss von Störschwingungen und weiteren die Amplitudenunterschiede vergrößernden Effekten. Die Amplitude der Sekundärschwingung der Detektionsmasse sei daher deutlich stärker als diejenige der Antriebsmasse. Dies beruhe vor allem auf einem Quadraturfehler, der dafür sorge, dass der Amplitudenunterschied im Betrieb typischerweise ein Mehrfaches der aufhängungs-bedingten 10 % betrage. Entgegen der Auffassung des Landgerichts sei die Antriebsmasse daher weniger stark verkippt als die Detektionsmasse. Zumindest trage die Klägerin insoweit eine sekundäre Darlegungslast. Überraschend habe das Landgericht das pauschale Bestreiten der Beklagten im Urteil als ausreichend erachtet. Auch die zweitinstanzlichen Ausführungen der Beklagten blieben „bruchstückhaft“. Schon der komplexe Aufbau der angegriffene Ausführungsformen – Verbindung der Detektionsmasse mit der Antriebsmasse über Transferfedern – spreche prima facie für eine definierte (und intendierte) Teilbeweglichkeit der verbundenen Massen anstatt einer angeblich starren Verbindung.
22Entgegen der Berufungserwiderung sei (hinsichtlich beider Argumentationsstränge der Klägerin) auch das Merkmal 5 erfüllt. Dem stehe nicht entgegen, dass die Verkippung (auch) durch als Drehpunkt wirkende Außenanker ermöglicht werde. Dass dies nämlich einen Einfluss auf die Rückstellung der unter Corioliskraft verkippten äußeren Massen habe, behaupte die Beklagte ebenso wenig wie sie bestreite, dass die Außenanker eine Rückstellkraft aufbrächten. Die Klägerin gebe die einschlägigen Passagen des BPatGU unvollständig wieder und unterschlage somit, dass es dem Bundespatentgericht auf die Anordnung der Außenanker angekommen sei. Bei den angegriffen Ausführungsformen griffen die Außenanker unstrittig an die äußere Antriebsmasse an und sorgten damit für die erforderliche Rückstellung. Wie die Verkippung zu erfolgen habe, sei erfindungsgemäß nicht zwingend vorgegeben.
23Selbst wenn beide Massen in der Sekundärmode nicht teilweise entkoppelt i.S.v. Merkmal 2.2 wären, verwirkliche das „Beating Heart“ Konstruktionsprinzip (s. zu dieser hilfsweisen Verletzungsargumentation im Detail S. 12 ff. der erstinstanzlichen Triplik) den Anspruch 1 des Klagepatents, insbesondere die vom LGU verneinten Merkmale 2.1, 3 und 4: Entgegen der Auffassung des Landgerichts offenbarten die vorgelegten Abbildungen des Sensors (Abb. Blatt 289 GA) sehr deutlich eine rechteckige Grundstruktur und den Umstand, dass die in der genannten Abbildung blau umrandeten, horizontalen Antriebsmassen weiter vom Zentrum des Sensors beabstandet seien als die Detektionsmassen. Das gelte für den jeweils kürzesten Abstand zwischen dem Zentrum und dem jeweils nächstgelegenen Punkt einer Masse wie auch dann, wenn man auf die jeweiligen Massenschwerpunkte der Detektionsmasse und der Antriebsmasse abstelle: Die Massenschwerpunkte seien durch ein einfaches Balanceverfahren aufgefunden worden. Mit Blick auf das Merkmal 2.2 ergebe sich aus Abb. 7 der erstinstanzlichen Triplik, dass im PitchMode die Primärschwingung zwar um 90 Grad umgelenkt, jedoch gleichwohl vollständig übertragen werde. Die Detektionsmasse übernehme die Primärschwingung der Antriebsmasse in Phase, Amplitude und Frequenz identisch. Die im Sekundärmodus ausgeführte Kippbewegung der zweiteiligen Detektionsmasse sei in Abb. 7 der Triplik durch Verwendung abgestufter Farben hervorgehoben und werde praktisch nicht auf die Antriebsmasse übertragen, so dass hier eine starke Entkopplung vorliege. Hinsichtlich der Notwendigkeit der gleichzeitigen Verwirklichung der Merkmale 3 und 4 habe das Landgericht verfehlt angenommen, dass der Roll und Pitch Mode nicht gleichzeitig stattfinde. Tatsächlich verkippten Detektionsmasse und Antriebsmasse in der Regel gleichzeitig. Der streitgegenständliche Sensor sei in der Lage, Roll-, Nick- und Gierbewegungen gleichzeitig zu erfassen, was vor allem in der Luftfahrtindustrie eine Rolle spiele. Die angegriffenen Ausführungsformen könnten beliebige Sensordrehungen im dreidimensionalen Raum gleichzeitig detektieren. Soweit darüber hinaus etwaig zu verlangen sei, dass die Antriebsmasse auch im Pitch Mode verkippen können müsse, sei Folgendes zu beachten: Die Umlenkfedern, die die Antriebsmasse mit der Detektionsmasse federnd verbinden, schlössen aufgrund ihrer Mäander-Form (s. Abb. 6 der erstinstanzlichen Triplik) es nicht aus, dass die Kipp-Bewegung der Detektionsmasse zu einem (geringeren) Teil an die Antriebsmasse weitergegeben werde. Die Federaufhängung dieser Masse wie auch deren diverse quaderförmigen Führungselemente erlaubten ebenfalls eine gewisse Mitverkippung. Bei genauerer Betrachtung zeige sich, dass ein Übersprechen - eine Signalverzerrung im Rollmodus - nicht drohe. Wenn nämlich der eine Teil der zweitteiligen Detektionsmasse vom Substrat weggekippt werde, werde der andere Teil zum Substrat hin gekippt mit der Folge, dass die im Roll-Mode zur Signalgewinnung gemessene Kapazität, die die Antriebsmasse mit der Unterlage bilde, auf beiden Seiten unverändert bleibe, so dass die Detektion der Rollbewegung insgesamt nicht tangiert werde.
24Mit Blick auf Merkmal 2.1 sei nach dem natürlichen Sprachgebrauch darauf abzustellen, wie weit der Randbereich einer Masse vom Zentrum beabstandet sei. So sei auch eine Abstandsbestimmung im Rahmen aller Ausführungsbeispiele möglich. Optional sehe der Unteranspruch 3 ein Abstellen auf die Massenschwerpunkte vor. Den angegriffenen Ausführungsformen liege ein rechteckiger Bauplan zugrunde. Damit ergebe sich unmittelbar, dass die Massen zwangsläufig unterschiedlich weit vom Zentrum entfernt seien. Das habe sie in der mündlichen Verhandlung erster Instanz auch so vorgetragen. Die Abb. 5 auf S. 8 der Berufungsbegründung sei nur eine vergrößerte Form der Abb. 5 der Triplik erster Instanz und damit kein neuer Vortrag. Ihren diesbezüglichen tatsächlichen Vortrag bestreite die Beklagte zweitinstanzlich auch nicht mehr. Ihren Vortrag zu den Masseschwerpunkten habe die Beklagte ebenfalls nicht substantiiert bestritten.
25Die Klägerin beantragt,
26das Urteil des Landgerichts Düsseldorf vom 14.12.2017 , Az. 4a O 75/16, abzuändern und wie folgt zu erkennen:
27I. Die Beklagte wird verurteilt,
281. es bei Meidung eines für jeden Fall der Zuwiderhandlung vom Gericht festzusetzenden Ordnungsgeldes von bis zu EUR 250.000,00, ersatzweise Ordnungshaft, oder einer Ordnungshaft bis zu sechs Monaten, im Falle wiederholter Zuwiderhandlung bis zu insgesamt zwei Jahren, wobei die Ordnungshaft an den Geschäftsführern der Beklagten zu vollziehen ist, zu unterlassen,
29Drehratensensoren zur Detektion einer Drehung Ω, um die der Sensor gedreht wird,
30in der Bundesrepublik Deutschland anzubieten, in Verkehr zu bringen oder zu gebrauchen oder zu den genannten Zwecken entweder einzuführen oder zu besitzen
31wobei der Sensor ein Substrat und eine Antriebs- und Detektionsanordnung aufweist, die sich im Wesentlichen flächig in einer xy-Ebene oberhalb der Substratoberfläche befindet, wobei die Antriebs- und Detektionsanordnung eine Antriebsmasse und eine Detektionsmasse aufweist, die in unterschiedlichen Abständen von einem Zentrum (Z) der Detektionsanordnung symmetrisch um dieses Zentrum herum angeordnet sind und deren Schwingungsmoden teilweise aufeinander übertragen werden können und teilweise entkoppelt sind, wobei die Drehung Ω dadurch detektiert wird, dass eine Verkippung der Detektionsmasse aus der Flächenebene der Antriebs- und Detektionsanordnung heraus detektiert wird, wobei diejenige der beiden Massen, die einen größeren Abstand zu dem genannten Zentrum aufweist, unter der Einwirkung von Corioliskraft aus der genannten Flächenebene heraus verkippen kann,
32dadurch gekennzeichnet, dass die genannte verkippbare Masse über symmetrisch angeordnete Außenanker mit dem Substrat derart verbunden ist, dass die Rückstellung der genannten Verkippung durch die Außenanker unterstützt wird;
332. der Klägerin darüber Auskunft zu erteilen, in welchem Umfang die Beklagte die zu Ziffer I. 1. bezeichneten Handlungen seit dem 24. Juni 2015 begangen hat, und zwar unter Angabe
34a) der Namen und Anschriften der Hersteller, Lieferanten und anderer Vorbesitzer,
35b) der Namen und Anschriften der gewerblichen Abnehmer sowie der Verkaufsstellen, für die die Erzeugnisse bestimmt waren, sowie
36c) der Menge der hergestellten, ausgelieferten, erhaltenen oder bestellten Erzeugnisse sowie der Preise, die für die betreffenden Erzeugnisse bezahlt wurden;
37wobei zum Nachweis der Angaben die entsprechenden Kaufbelege
38(Rechnungen, hilfsweise Lieferscheine) in Kopie vorzulegen sind, wobei geheimhaltungsbedürftige Details außerhalb der auskunftspflichtigen Daten geschwärzt werden dürfen;
393. der Klägerin darüber Rechnung zu legen, in welchem Umfang die Beklagte die zu Ziffer I. 1. bezeichneten Handlungen seit dem 1. Januar 2013 begangen hat, und zwar unter Angabe
40a) der einzelnen Lieferungen, aufgeschlüsselt nach Liefermengen, -zeiten, -preisen und Typenbezeichnungen sowie der Namen und Anschriften der Abnehmer,
41b) der einzelnen Angebote, aufgeschlüsselt nach Angebotsmengen, -zeiten, -preisen und Typenbezeichnungen sowie der Namen und Anschriften der Angebotsempfänger,
42c) der betriebenen Werbung, aufgeschlüsselt nach Werbeträgern, deren Auflagenhöhe, Verbreitungszeitraum und Verbreitungsgebiet,
43d) der nach den einzelnen Kostenfaktoren aufgeschlüsselten Gestehungskosten und des erzielten Gewinns,
44wobei es der Beklagten vorbehalten bleibt, die Namen und Anschriften der nicht-gewerblichen Abnehmer und der Angebotsempfänger statt der Klägerin einem von der Klägerin zu bezeichnenden, ihr gegenüber zur Verschwiegenheit verpflichteten, in der Bundesrepublik Deutschland ansässigen, vereidigten Wirtschaftsprüfer mitzuteilen, sofern die Beklagte dessen Kosten trägt und ihn ermächtigt und verpflichtet, der Klägerin auf konkrete Anfrage mitzuteilen, ob ein bestimmter Abnehmer oder Angebotsempfänger in der Aufstellung enthalten ist; und
45wobei die Angaben zu lit. d) erst für die Zeit seit dem 24.07.2015 zu machen sind;
464. die zu Ziffer I. 1. bezeichneten und ab dem 24.07.2015 in Verkehr gebrachten Erzeugnisse gegenüber den gewerblichen Abnehmern unter Hinweis auf den gerichtlich festgestellten patentverletzenden Zustand der Sache und mit der verbindlichen Zusage zurückzurufen, etwaige Entgelte zu erstatten sowie notwendige Verpackungs- und Transportkosten sowie mit der Rückgabe verbundene Zoll- und Lagerkosten zu übernehmen und die erfolgreich zurückgerufenen Erzeugnisse wieder an sich zu nehmen.
47II. Es wird festgestellt, dass die Beklagte verpflichtet ist,
481. der Klägerin für die zu Ziffer I. 1. bezeichneten, in der Zeit vom 1. Januar 2013 bis zum 23. Juli 2015 begangenen Handlungen eine angemessene Entschädigung zu zahlen,
492. der Klägerin allen Schaden zu ersetzen, der dieser durch die zu Ziffer I. 1. bezeichneten Handlungen seit dem 24. Juli 2015 entstanden ist und noch entsteht.
50Die Beklagte beantragt,
51die Berufung zurückzuweisen,
52hilfsweise Aussetzung des Rechtsstreits bis zur Entscheidung im Nichtigkeitsberufunsgverfahren betreffend das Klagepatent.
53Die Beklagte verteidigt das angefochtene Urteil im Wesentlichen wie folgt: Das Landgericht habe die Klage im Ergebnis zu Recht abgewiesen. Insoweit habe das Landgericht allerdings das Merkmal 2.2 unter seinen Wortsinn ausgelegt. Dieses Merkmal könne nur so verstanden werden, dass eine Schwingungsmode vollständig entkoppelt sein müsse. Es sei erstinstanzlich unstreitig gewesen, dass das Teilmerkmal „teilweise“ so zu verstehen sei, dass ein Teil der Schwingungsmoden zwischen der Antriebs- und der Detektionsmasse übertragen werde und ein anderer Teil entkoppelt sei. Zwar habe das Landgericht dies noch richtig erkannt, alsdann jedoch dem Wort „teilweise“ eine Doppelbedeutung zugewiesen, indem es diesem ferner entnommen hat, die Entkoppelung müsse nicht zu 100 % erfolgen. Einem mehrdeutigen Verständnis stehe schon entgegen, dass der Begriff „teilweise“ nur ein einziges Mal im Anspruch aufscheine. Die Bedeutung von „teilweise“ erschöpfe sich in dem Umstand, dass nur ein Teil der Schwingungsmoden entkoppelt sei, so dass diese nicht auch noch den Grad der Entkoppelung erfassen könne. Ohne weitere anspruchsgemäße Vorgaben zum Teilmerkmal „entkoppelt“ könne damit nur eine vollständige Entkoppelung gemeint sein. Für ein abweichendes Verständnis gäben weder die Unteransprüche noch die Beschreibung des Klagepatents etwas her. Ebenso wenig sei die Ansicht des Landgerichts mit der technischen Funktion der Entkoppelung vereinbar. Bei zutreffender Auslegung sei das Merkmal 2.2 daher schon deshalb nicht erfüllt, weil es – unstreitig - nicht zu einer vollständigen Entkopplung komme. Aber auch unter Zugrundelegung der Auslegung des Landgerichts bzw. der Klägerin sei das Merkmal 2.2 nicht erfüllt, wie das Landgericht richtig erkannt habe: Der in der Berufungsinstanz vorgelegte Testbericht (Anlage BK 2) sei ein nicht zulassungsfähiger neuer Sachvortrag. Hilfsweise macht die Beklagte geltend, der betreffende Testbericht vermöge die Verwirklichung von Merkmal 2.2 auch inhaltlich nicht zu stützen. Abgesehen von diversen Ungenauigkeiten des Versuchsaufbaus sei das Ergebnis des Tests nicht schlüssig: Eine Übertragung der Auslenkung der Schwingungsmasse im stationären Fall zu 90 % sei keine funktional relevante Entkopplung der Sekundärschwingung. Hinzu komme, dass im praktischen Betrieb die Übertragung noch deutlich höher ausfalle. Soweit die Klägerin erstmalig in der zweiten Instanz behaupte, der Unterschied der Verkippung der beiden Massen sei in der Praxis aufgrund von Störschwingungen und elektrostatischen Kräften erheblich größer, sei auch dieses Vorbringen nicht mehr zu berücksichtigen. Hilfsweise bestreitet die Klägerin die Messergebnisse der Klägerin, insbesondere rügt sie, dass diese nicht auf tatsächlichen Messungen beruhten. Insoweit müsse der Frequenzgang jeder der drei Massen betrachtet werden. Diese hätten mit dem tatsächlichen Betrieb nichts zu tun. Tatsächlich liege der Arbeitspunkt der angegriffenen Ausführungsformen bei ca. 8 kHz, so dass auch die Corioliskraft mit dieser Frequenz wirke. Die Klägerin zeige in ihrer Prinzipskizze aber nicht den Frequenzgang der out-of-plane-Schwingungen der Gesamtmasse. Diese sei nicht entkoppelt, wie ihre eigenen Berechnungen ergäben. Selbst die Darstellung der Beklagten zum individuellen Frequenzgang sei fehlerhaft. Es sei schlicht unmöglich, alle Merkmale des Anspruchs 1 zu verwirklichen, wenn (wie bei den angegriffenen Ausführungsformen) die Antriebsmasse außen und die Detektionsmasse innen angeordnet sei; entweder sei Merkmal 2.2 oder das Merkmal 4 nicht erfüllt.
54Ferner sei das Merkmal 5 u.a. bei Betrachtung der primären Verletzungsargumentation der Klägerin nicht verwirklicht: Nach dem BPatGU (dort S. 21 und S. 24) sei ein „Verkippen“ nur dann gegeben, wenn das jeweilige Element eine Winkelbewegung um eine Drehachse ausführe. Wie bei der Entgegenhaltung D 2 im Nichtigkeitsverfahren werde bei den angegriffenen Ausführungsformen eine „schräge“ Verkippung der Antriebs- und Detektionsmasse erst durch die Außenanker verursacht. Die Außenanker bildeten also die Drehachse und ermöglichten erste eine Verkippung anstatt dieser entgegenzuwirken.
55Entgegen der Ansicht der Klägerin sei das Merkmal 4 nicht so zu verstehen, dass jedenfalls auch die äußere der beiden Massen unter der Einwirkung der Corioliskraft verkippen könne. Ebenso wenig könnten zwei Massen auch dann entkoppelt sein, wenn sie jeweils „autonom“ unter der Einwirkung der Corioliskraft verkippten. Die Klägerin verkenne, dass lediglich zwei ganz konkrete Ausführungsformen in den Schutzbereich des Anspruchs 1 des Klagepatents fielen. Bei der u.a. erfassten Anordnung mit außenliegender Detektionsmasse und innenliegender Antriebsmasse verlange Anspruch 1, dass die Primärschwingung übertragen und die Sekundärschwingung entkoppelt sei. Nicht erfasst sei eine Anordnung mit außenliegender Antriebsmasse und innenliegender Detektionsmasse, bei der die Primärschwingung übertragen werde. Hierbei sei zu beachten, dass es auf die Entkopplung einer Schwingungsmode ankomme, was erfordere, dass eine der beiden Massen die Schwingungsmode nicht ausführe. In der nach Ansicht der Klägerin auch erfassten Anordnung sei zumindest Merkmal 2.2 nicht erfüllt, weil beiden Massen sowohl die Primär- als auch die Sekundärschwingung ausführten; ihre – der Klägerin – Auffassung finde auch eine Bestätigung im BPatGU (dort. S. 27).
56Auch nach der hilfsweisen Verletzungsargumentation der Klägerin sei keine Patentverletzung anzunehmen: Es fehle hier unter anderem an der Erfüllung des Merkmals 2.1. Der diesbezügliche Vortrag auf S. 17 ff. der Berufungsbegründung zur Frage des Abstandes sei neu und nicht berücksichtigungsfähig. Der erstinstanzliche Vortrag der Klägerin sei – wie das Landgericht ausgeführt hat – unsubstantiiert gewesen. Nach ihrem – der Beklagten – unstreitigen Hinweis im Termin zur mündlichen Verhandlung vor dem Landgericht hätte die Klägerin in erster Instanz näher vortragen müssen. Hilfsweise macht die Klägerin geltend: Mit Blick auf den „Abstand“ i.S.v. Merkmal 2.1 könne es weder auf die Masseschwerpunkte noch auf den jeweils nächstgelegenen Punkt einer Masse zum Zentrum ankommen. Vielmehr sei der Begriff des „Abstandes“ funktional in dem Sinne zu verstehen, dass es im Wesentlichen auf die Anordnung der Massen in Bezug auf ein Zentrum ankomme. Bei den angegriffenen Ausführungsformen fehle es daran, weil - unstreitig - beide Massen mittels Federstrukturen direkt mit dem Zentrum verbunden seien, ohne dass die innere Masse zwischen der äußeren Masse und dem Zentrum liege. Ziehe man bei den angegriffenen Ausführungsformen eine gedankliche Achse, so gehe diese entweder durch die (hilfsweise) Antriebsmasse oder durch die (hilfsweise) Detektionsmasse. Die Achse verlaufe also gerade nicht vom Zentrum ausgehend zunächst durch die innere Masse und dann durch die äußere Masse. Hilfsweise bestreitet die Beklagte die Behauptungen der Klägerin zu den Masseschwerpunkten. Abgesehen davon habe das Landgericht zu Recht angenommen, dass die Merkmale 3 und 4 zugleich erfüllt sein müssten, was bei der hilfsweisen Verletzungsargumentation der Klägerin nicht der Fall sei. Die Klägerin habe auf S. 14 der erstinstanzlichen Triplik selbst vorgetragen, dass im „Roll Mode“ und im „Pitch Mode“ jeweils nur die (hilfsweise) Antriebsmasse und die (hilfsweise) Detekionsmasse verkippten. Der Berufungsvortrag der Klägerin zum Fall einer gleichzeitigen Drehung der angegriffenen Ausführungsformen um zwei Achsen schließe nach eigenem Vorbringen der Klägerin ein, dass „Detektionsmasse und Antriebsmasse in aller Regel gleichzeitig verkippten“. Damit fehle es an jedenfalls einer Verwirklichung des Merkmals 2.2. Hinzu komme, dass jede Drehachse individuell zu betrachten sei und daher sämtliche Merkmale des Anspruchs 1 in Bezug auf die individuelle Drehachse erfüllt sein müssten. Es genüge nicht, wenn die Kombination aller Anspruchsmerkmale nur bei Drehungen um mehrere Achsen gleichzeitig erfüllt würden.
57Analog zu den Ausführungen betreffend die primäre Verletzungsargumentation sei überdies das Merkmal 5 auch unter Zugrundelegung der hilfsweisen Verletzungsargumentation der Klägerin nicht verwirklicht.
58Weiter hilfsweise begehrt die Beklagte die Aussetzung des Verletzungsrechtsstreits. Das BPatGU beruhe auf einer offensichtlich fehlerbehafteten Begründung in Bezug auf die Beurteilung der Neuheit der technischen Lehre des Klagepatents.
59Wegen der weiteren Einzelheiten des Sach- und Streitstands wird ergänzend auf die wechselseitigen Schriftsätze der Parteien nebst Anlagen sowie auf den Akteninhalt im Übrigen Bezug genommen.
60II.
61Die zulässige Berufung der Klägerin ist unbegründet. Weder auf der Basis ihres Hauptvorbringens noch ihres Hilfsvorbringens machen die angegriffenen Ausführungsformen wortsinngemäßen Gebrauch von der technischen Lehre des Hauptanspruchs 1 des Klagepatents.
621.
63Das Klagepatent lehrt einen in einer x-y-Ebene angeregten Vibrations-Drehratensensor.
64Im Rahmen seiner einleitenden Bemerkungen hält das Klagepatent fest, dass bei mikromechanischen (MEMS) Drehratensensorstrukturen insbesondere die mechanisch entkoppelten Vibrationssensoren sehr effektiv seien und ein hohes Signal/Rausch-Verhältnis aufwiesen. Diese Drehratensensoren beruhten - wie das Klagepatent erläutert - auf dem Prinzip, dass die Corioliskraft Energie von einer Schwingungsmode, der Primärschwingung, in eine zweite Schwingungsmode, die Sekundärschwingung, einkoppele. Die Amplitude der Sekundärschwingung sei dabei proportional zur Drehrate und könne beispielsweise kapazitiv ausgewertet werden (Abs. [0002] des Klagepatents). Derartige Drehratensensoren könnten die Rotationsgeschwindigkeit eines Körpers messen.
65Alsdann widmet sich das Klagepatent einem mechanisch entkoppelten Vibrationsdrehratensensor (vgl. nachfolgend (verkleinert) eingeblendete Fig. 3b des Klagepatents).
66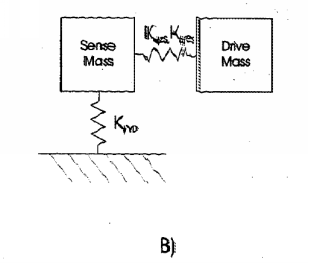
67In solchen Vibrationsdrehratensensoren - so das Klagepatent - werde eine Antriebsmasse mit zwei Freiheitsgraden in der Primärschwingung angeregt. Dieser Drehratensensor umfasse demzufolge eine erste, in einer x-y-Ebene angeordnete Antriebsmasse, die zu einer oszillierenden Schwingung angeregt wird. Ferner umfassten solche Sensoren eine zweite Masse, die für die Detektion verwendet werde (Detektionsmasse). Die Detektionsmasse sei über Verbindungsglieder (Federn) mit der Antriebsmasse verbunden. Die durch eine aufgeprägte Drehrate induzierte Corioliskraft führe zu einer Auslenkung im zweiten Freiheitsgrad (Sekundärschwingung), d.h. zu einer Verkippung der Detektionsmasse, die z.B. mit kapazitiven Elektroden erfasst werden könne.
68Die Entkopplung könne auf verschiedene Art und Weise bewirkt werden:
69In einer ersten Variante, in der die Primärschwingung entkoppelt sei, wirke die Corioliskraft auf die Massenpunkte des in Rotationsschwingung befindlichen Körpers (Antriebsmasse) ein; durch geeignete Maßnahmen werde diese Kraft auf die Detektionsmasse übertragen. Deren Auslenkung in dieser Dimension (Verkippung) werde sodann mit geeigneten Mitteln detektiert. Dabei sei die Kopplung zwischen den beiden Massen oder Elementen idealiter derart, dass die Rotationsschwingung (Primärschwingung) nicht auf die Detektionsmasse übertragen werde. Dies lasse sich verwirklichen, indem die Detektionsmasse so aufgehängt sei, dass sie nur einen einzigen Bewegungsfreiheitsgrad besitze. Als Vorteil dieser Entkopplungsmethode der Primärmode hebt das Klagepatent hervor, dass die Detektion der Auslenkung (Verkippung) – und damit der Drehrate – nur wenig beeinflusst von der Antriebs-Drehbewegung gemessen werden könne. Weil die Primärbewegung im Antriebs-Mode nicht oder nur partiell erfasst werde, weise das Nutzsignal ein höheres Signal/Rausch-Verhältnis auf. Nachteilig sei daran allerdings, dass sich das Antriebselement bei Einwirkung einer Drehrate aus der x-y-Ebene heraus verkippe, was die Antriebsleistung verschlechtert (Abs. [0009] des Klagepatents).
70Sodann offenbart das Klagepatent eine zweite Variante, bei der die Sekundärmode entkoppelt ist: hier werde die Rotationsbewegung der ersten Masse auf die zweite Masse übertragen, so dass die Corioliskraft auf die Massenpunkte beider Körper einwirke, wobei die Antriebsmasse jedoch so aufgehängt sei, dass sie nicht aus der x-y-Ebene verkippt oder ausgelenkt werden könne (Abs. [0008] des Klagepatents). Bei dieser zweiten Variante seien die vorbeschriebenen Vor- und Nachteile der Entkopplung der Primärschwingung vertauscht (Abs. [0009] des Klagepatents): Demnach werde die Antriebsleistung der Antriebsmasse nicht durch eine Verkippung verschlechtert, während das Signal/Rausch-Verhältnis schlechter sei, weil die Detektionsmasse auch die Primärschwingung ausführe.
71Das Klagepatent geht sodann auf einige wesentliche Druckschriften (insbesondere auf das EP 0906557 und US 5955668) ein, die auf dem Prinzip eines Vibrationsgyroskops beruhten. Der prinzipielle Aufbau eines rotatorischen, mechanisch entkoppelten ergebe sich aus der schematischen Darstellung in Fig. 4 des Klagepatents, die nachfolgend verkleinert wiedergegeben ist:
72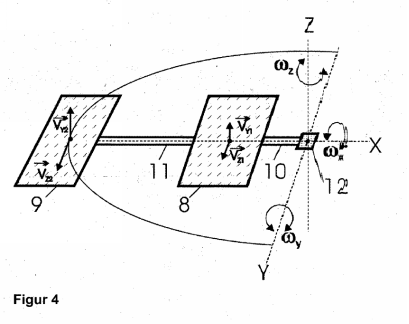
73Gemäß dieser Figur 4 ist ein bewegliches Masseelement (8) (Detektionsmasse) zentral an einem Ankerpunkt (12) über eine Federstruktur (10) aufgehängt. Über eine zweite Federstruktur (11) ist ein weiteres Masseelement (9) (Antriebmasse) fest mit der Detektionsmasse (8) verbunden. Die Antriebsmasse (9) wird zu einer periodischen Bewegung um die z-Achse angeregt (Abs. [0015] des Klagepatents).
74Die Antriebsmasse (9) verfüge im Wesentlichen über zwei Bewegungsfreiheitsgrade, nämlich eine rotatorische Bewegung um ein Achse parallel zur Z-Achse (oder auch um die z-Achse selbst) sowie eine rotatorische Bewegung um eine Achse parallel zur Y-Achse (oder um die Y-Achse selbst). Dagegen habe die Detektionsmasse 8 im Idealfall nur einen einzigen Freiheitsgrad, und zwar eine Rotationsbewegung um die Y-Achse (Abs. [0016] des Klagepatents). Im Falle eines mechanisch entkoppelten Systems in Bezug auf diesen rotativen Freiheitsgrad werde dann - mangelseines Freiheitsgrades - bei einer Bewegung von der Antriebsmasse (9) um die Z-Achse keine Bewegungsenergie zur Detektionsmasse (8) übertragen.
75Beim Betrieb der vorstehend dargestellten Einheit werde die Antriebsmasse (9) in eine periodische Schwingung um eine Z-Achsenparallele versetzt. Diese Schwingung sei die „Primärschwingung“ bzw. „Primärmode“. Werde das Schwingungssystem um die sensitive Achse X gedreht, so wirke eine Scheinkraft auf die bewegte Antriebsmasse (9) ein, nämlich die Corioliskraft (Abs. [0018] des Klagepatents). Hierdurch werde ein oszillierendes Kraftfeld senkrecht zur X-Y Ebene erzeugt, welches zu einer Auslenkung der Antriebsmasse (9) aus der Ebene führe. Diese Z-Auslenkung (Sekundärmode) werde über das Federelement (11) auf die Detektionsmasse (8) übertragen. Die Größe der Auslenkung der Antriebsmasse (9) könne also direkt zur Bestimmung der Drehrate verwendet werden (Abs. [0018] des Klagepatents).
76Die meisten Drehratensensor-Systeme beruhten auf einer kapazitiven Auslenkung der Sense-Masse (vgl. Fig. 6 des Klagepatents).
77Das Klagepatent macht mit Blick auf den vorbeschriebenen Stand der Technik folgende Nachteile aus:
78Erstens sei in der Realität häufig eine Vorverkippung der beweglichen Teile aus der waagerechten Ruhelage zu beobachten (Abs. [0024] des Klagepatents). Eine solche Vorverkippung bewirke eine reduzierte Auflösung des Sensorsystems (Abs. [0025] f. des Klagepatents).
79Zweitens sei ein Anhaften von beweglichen Sensorelementen an feststehenden Sensorelementen nachteilig (sog. Sticking). Während der Fertigung oder im Laufe der Lebensdauer des Sensorelementes könne es zu einem Kontakt zwischen beweglichen und/oder feststehenden Elementen kommen. Im ungünstigen Fall, wenn die Rückstellkräfte zu klein seien, werde durch zahlreiche Adhäsionskräfte die Auslenkung zeitweise oder dauerhaft aufrechterhalten, so dass der Sensor nicht mehr funktionstüchtig sei und haften bleibe ("Sticking"). Auch ein mechanischer Schock oder Vibrationseinwirkung könne einen innigen Kontakt von beweglichen Sensorelementen hervorrufen, so dass diese festklemmten oder festklebten. Vor allem die weit von einem Ankerpunkt befindlichen äußeren Sensorstrukturen wiesen durch die Hebelwirkung eine höhere Adhäsionsneigung auf.
80Durch Erhöhung der Rückstellkräfte, z.B. durch breitere Federn, könne zwar die bewegliche Struktur steifer konstruiert werden. Dadurch werde jedoch auch das Nutzsignal reduziert, weil die Corioliskraft zu einer geringeren Plattenauslenkung und somit zu einer reduzierten Sensitivität führe (Abs. [0027] des Klagepatents).
81Vor diesem technischen Hintergrund formuliert das Klagepatent in seinem Abs. [0028] die Aufgabe, Drehratensensoren der voranstehend erwähnten Art bereitzustellen, bei denen die Sensitivität ausreichend bleibe, jedoch die Robustheit gegenüber parasitärer Umgebungseinwirkung verbessert werde, um eine gute Balance zwischen diesen sich gegenseitig beeinflussenden Parametern zu erhalten.
82Zur Lösung dieses technischen Problems sieht das Klagepatent gemäß seinem Hauptanspruch 1 einen Drehratensensor mit folgenden Merkmalen vor:
831. Drehratensensor zur Detektion einer Drehung Ω, um die der Sensor gedreht wird.
842. Der Sensor weist ein Substrat und eine Antriebs- und Detektionsanordnung auf, die sich im Wesentlichen flächig in einer x-y-Ebene oberhalb der Substratoberfläche befindet.
852.1 Die Antriebs- und Detektionsanordnung weist eine Antriebsmasse (4) und eine Detektionsmasse (3) auf, die in unterschiedlichen Abständen von einem Zentrum (Z) der Detektionsanordnung symmetrisch um dieses Zentrum herum angeordnet sind und
862.2. deren Schwingungsmoden teilweise aufeinander übertragen werden können und teilweise entkoppelt sind.
873. Die Drehung Ω wird dadurch detektiert, dass eine Verkippung der Detektionsmasse aus der Flächenebene der Antriebs- und Detektionsanordnung heraus detektiert wird.
884. Diejenige der beiden Massen (3,4), die einen größeren Abstand zu dem genannten Zentrum aufweist, kann unter der Einwirkung von Corioliskraft aus der genannten Flächenebene heraus verkippen.
895. Die genannte verkippbare Masse (3,4) ist über symmetrisch angeordnete Außenanker (7) mit dem Substrat derart verbunden, dass die Rückstellung der genannten Verkippung durch die Außenanker (7) unterstützt wird.
902.
91Mit ihrer primären Verletzungsargumentation vermag die Klägerin nicht durchzudringen, weil sich insoweit jedenfalls nicht tatrichterlich feststellen lässt, dass die angegriffenen Ausführungsformen das Merkmal 2.2 wortsinngemäß verwirklichen.
922.1
93Das Merkmal 2.2 verlangt u.a., dass die Schwingungsmoden der Antriebs- und der Detektionsmasse „teilweise entkoppelt“ sind.
94(a)
95Der Durchschnittsfachmann versteht das Merkmal 2.2 in dem Sinne, dass es einer (nahezu) vollständigen Entkopplung bedarf. Demnach genügt - anders als das Landgericht meint - nicht schon jede technisch relevante Entkopplung und - entgegen der Klägerin - erst recht nicht jedwede noch so geringe Verminderung der Übertragung einer Schwingungsmode. Vielmehr muss der Übertragungsbetrag (nahezu) gleich dem Wert null sein.
96(aa)
97Das Wort „teilweise“ macht - entgegen der Auslegung des Landgerichts - keine Vorgaben in Bezug auf das notwendige Ausmaß der Entkopplung. Vielmehr bestimmt dieses Wort ausschließlich das Bezugsobjekt der vorgesehenen Entkopplung. Es rekurriert daher allein auf die Schwindungsmoden und zwar einerseits die Primärschwingung und andererseits die Sekundärschwingung.
98Mit Blick auf den Wortlaut des Merkmals 2, wonach gerade die Schwingungsmoden „teilweise aufeinander übertragen werden können und teilweise entkoppelt sind“, ist es folglich zwischen den Parteien zu Recht unstreitig, dass sich der Sinngehalt von „teilweise“ in folgender Festlegung erschöpft: Ein Teil der Schwingungsmoden (beispielsweise die Primärschwingung) kann übertragen werden und der jeweils andere Teil der Schwingungsmoden (beispielsweise die Sekundärschwingung) ist entkoppelt. Dass die Bedeutung des Teilmerkmals „teilweise“ damit verbraucht ist, hat die Klägerin in der Berufungsreplik (S. 7, 3. Abs.) eingeräumt und klargestellt, dass sich ihr Verständnis zum - vermeintlich ausreichenden - geringfügigen Ausmaß der Entkopplung allein auf das Teilmerkmal „entkoppelt“ (in Verbindung mit der Beschreibung des Klagepatents und den Unteransprüchen) gründe. Zudem hat die Klägerin im Termin zur mündlichen Verhandlung vor dem Senat vom 27.06.2019 explizit klargestellt, dass sich die Bedeutung des Wortes „teilweise“ im vorbeschriebenen Sinne erschöpfe.
99Zwar ist ein Verletzungsgericht an eine übereinstimmende Auslegung der Parteien keineswegs gebunden, da es sich insoweit um einen reinen Rechtsvortrag handelt (BGH, GRUR 1991, 138 - Flacon). Jedoch besteht vorliegend für ein abweichendes Verständnis angesichts des genannten Wortlauts kein tauglicher Anhalt. Ist demnach der Sinngehalt des Teilmerkmals „teilweise“ im vorstehenden Sinne - nämlich einer Differenzierung zwischen den bzw. im Sinne einer Auswahl aus den vorhandenen Schwingungsmoden - aufzufassen, so verbietet es sich, dieses Teilmerkmal zugleich als nähere Umschreibung des Grades der Entkopplung zu verstehen. Solches wäre allenfalls möglich, wenn das Wort „teilweise“ mehrfach im Anspruch 1 bzw. Merkmal 2.2 aufscheinen würde und es sich darunter zumindest einmal nicht auf die Schwingungsmoden bezöge. Nur dann käme es überhaupt in Betracht, ein unterschiedliches Verständnis desselben Begriffs in unterschiedlichen Zusammenhängen zugrunde zu legen (vgl. BGH, GRUR 2017, 152 - Zungenbett). Hier taucht der Begriff „teilweise“ zwar zweimal im Merkmal 2.2 auf. Jedoch bezieht er sich beide Male auf die Schwingungsmoden, nämlich einmal in Bezug auf den Fall der Übertragung und einmal in Bezug auf den Fall der Entkopplung.
100Schließlich verbietet sich eine abweichende Auslegung von „teilweise“ jedenfalls in Anbetracht der Beschreibung des Klagepatents. Insoweit wird auf die sogleich folgenden Ausführungen zum Teilmerkmal „entkoppelt“ entsprechend verwiesen.
101(bb)
102Entgegen der Auffassung der Klägerin ist auch das Teilmerkmal „entkoppelt“ so zu verstehen, dass es einer (nahezu) vollständigen Entkopplung einer der Schwingungsmoden bedarf.
103Das Klagepatent lehrt einen Drehratensensor, der dazu dient, eine Drehung Ω zu detektieren, um die ein Sensor gedreht wird. Als (nicht abschließend aufzufassende) Bestandteile des Sensors erwähnt der Anspruch 1 ein Substrat und eine Antriebsanordnung einerseits und eine Detektionsanordnung andererseits (Merkmal 2). Im Wege einer Ortsangabe hält das Merkmal 2 ferner fest, dass sich die Antriebs- und Detektionsanordnung im Wesentlichen flächig in einer X-Y-Ebene oberhalb der Substratoberfläche befinden. Die Antriebs- und die Detektionsanordnung verfügen über eine Antriebsmasse und eine Detektionsmasse (Merkmal 2.1). Der insoweit offene Wortlaut des Merkmals 2.1 belässt es im fachmännischen Belieben, ob er die Antriebs- oder die Detektionsmasse - vom Zentrum aus betrachtet - innen oder außen platziert. Dieses Verständnis harmoniert mit dem Merkmal 4, welches ebenfalls nicht festlegt, welche der beiden Massen den größeren Abstand zum Zentrum haben soll. Im Wege einer weiteren Ortsangabe bestimmt das Merkmal 2.1, dass die vorgenannten Massen in unterschiedlichen Abständen von einem Zentrum (Z) der Detektionsanordnung symmetrisch um dieses Zentrum herum angeordnet sind.
104Das Merkmal 2.2 nimmt alsdann ausweislich des Anspruchswortlautes („und deren“) Bezug auf die zuvor im Merkmal 2.1 bereits erwähnte Antriebsmasse (oder synonym „Primärschwinger, vgl. Absatz [0008] des Klagepatents) und Detektionsmasse (oder synonym „Sekundärschwinger“). In Bezug auf die Schwingungsmoden - mithin nicht etwa die Massen selbst - der Antriebsmasse und der Detektionsmasse macht das Merkmal 2.2 zwei Vorgaben: Diese sollen - erstens - teilweise aufeinander übertragen werden können und - zweitens - sollen sie „teilweise entkoppelt“ sein. Dem Klagepatent sind genau zwei Schwingungsmoden geläufig und zwar einerseits die Primärschwingungsmode und andererseits die Sekundärschwingungsmode (vgl. nur [Absatz 0002] und [0010] des Klagepatents).
105(aaa)
106Bereits der Wortlaut „entkoppelt“ deutet - auch wenn im Anspruch keine darüber hinausgehende Graduierung enthalten ist - auf das hier befürwortete Verständnis hin, da unter einer Entkopplung gemeinhin verstanden wird, dass etwas aus einer Verbindung gelöst wird (vgl. www.duden.de/rechtschreibung/entkoppeln). Dies gilt jedenfalls dann, wenn man das Teilmerkmal „entkoppelt“ in der gebotenen Zusammenschau mit den anderen (Teil-)Merkmalen, mit welchen es eine Einheit bildet, betrachtet (vgl. BGH; GRUR 2012, 1124 - Polymerschaum). Insoweit differenziert das Teilmerkmal 2.2 in Bezug auf die Schwingungsmoden zwischen einer Übertragung (der jeweils einen Schwingungsmode) und einer Entkopplung (der jeweils anderen Schwingungsmode) und stellt diese Fälle gleichsam einander gegenüber. Dies spricht bereits gegen die Annahme, dass auch Zwischenzustände im Sinne einer partiellen Übertragung und einer partiellen Entkopplung ein- und derselben Schwingungsmode klagepatentgemäß sein könnten. Der Sinn dieser strikten Gegenüberstellung erschließt sich dem Fachmann dahingehend, dass eine hinreichend sensitive Messung erfordert, dass beide Schwingungsmoden in der Antriebsmasse und in der Detektionsmasse nicht „identisch“ sein sollen. Eine Messung der Drehrate mittels der Auslenkung der Detektionsmasse wäre bei identischer Auslenkung nicht möglich. Schließlich können auch nicht beide Moden entkoppelt sein, weil dies bedeuten würde, dass die Detektionsmasse keine Bewegung bzw. Schwingung ausführen würde und folglich keine Messung möglich wäre.
107(bbb)
108Zwar darf nicht verkannt werden, dass es für die Auslegung eines patentgemäßen Begriffs nicht auf das allgemeine Sprachverständnis (auf dem jeweiligen technischen Gebiet) ankommt, sondern jedes Patent gleichsam sein eigenes Lexikon für das Verständnis der in ihm verwendeten Begrifflichkeiten enthält, die folglich auch in einer vom allgemeinen (technischen) Sprachgebrauch verschiedenen Art und Weise aufzufassen sein können (vgl. BGH, GRUR 1999, 909 - Spannschraube; BGH, GRUR 2005, 754 - werkstoffeinstückig).
109Im Einzelfall bestehen allerdings keine Anhaltspunkte dafür, dass „entkoppelt“ im Zusammenhang mit der Erfindung so zu verstehen sei, dass auch ein geringeres Ausmaß als eine (nahezu) vollständige Entkopplung ausreichend wäre.
110(1)
111Die abweichende Ansicht des Landgerichts und der Klägerin verdient bereits deshalb keine Gefolgschaft, weil das Klagepatent in seinem Absatz [0017] eine Legaldefinition vorsieht, aus der sich ergibt, dass ausschließlich (nahezu) vollständige Entkopplungen klagepatentgemäß sind. Der besagte Absatz lautet wie folgt:
112„Ist der Geschwindigkeitsvektor Vz1 der Masse 8 gleich oder nahezu Null, so spricht man von einem mechanisch entkoppelten System bezüglich dieses rotativen Freiheitsgrades. S wird dann bei einer Bewegung von Masse 9 um die Z-Achse keine Bewegungsenergie zur Masse 8 übertragen.“
113Diese Passage ist Bestandteil derjenigen Ausführungen des Klagepatents, die der Erläuterung des Standes der Technik dienen. Sie verdeutlichen zusammen mit der zugehörigen Figur 4 den prinzipiellen Aufbau eines rotatorischen, mechanisch entkoppelten Drehratensensors gemäß der zweiten Variante einer möglichen Entkopplung (scil.: Entkopplung der Sekundärmode), wie sie dem Stand der Technik geläufig waren. Im Rahmen dieser Ausführungen präsentiert das Klagepatent sein Verständnis von einer „Entkopplung“, wonach (nahezu) keine Bewegungsenergie übertragen werden darf.
114Die Wiedergabe des Standes der Technik dient dem Klagepatent hier erkennbar nicht nur als bloßer Aufhänger. Vielmehr wird deutlich, dass das Klagepatent diesen Stand der Technik prinzipiell als vorteilhaft bewertet und insoweit für die Erfindung beibehalten will, weshalb es gerechtfertigt ist, für die Ermittlung des fachmännischen Verständnisses von „entkoppelt“ auf den Absatz [0017] des Klagepatents zurückzugreifen (vgl. Senat, Urteil v. 30.10.2014 - I-15 U 30/14; vgl. Senat, Urteil v. 26.10.2017 - I-15 U 95/16, rechtskräftig: vgl. BGH X ZR 133717). Dies gilt umso mehr, als auch im Übrigen nichts dafür ersichtlich ist, dass das Klagepatent (nahezu) vollständige Entkopplungen als überflüssig oder gar nachteilig erachtet. Die oben erwähnten Nachteile vorbekannter Lösungen und die auf deren Vermeidung gerichtete Aufgabe des Klagepatents betreffen nicht das vorbekannte Ausmaß einer Entkopplung, so dass nichts dagegen spricht, das vorbekannte Verständnis vom Ausmaß einer Entkopplung beizubehalten.
115Ebenso wenig steht die Definition im Absatz [0017] des Klagepatents in einem unauflösbaren Widerspruch zum im Anspruch genannten Begriff „entkoppelt“. Die Bedeutung der in einem Patentanspruch verwendeten Begriffe ist durch Auslegung des Patentanspruchs zu ermitteln, die nach der ständigen Rechtsprechung des BGH stets geboten ist und auch dann nicht unterbleiben darf, wenn der Wortlaut des Patentanspruchs eindeutig zu sein scheint (BGH, GRUR 2015, 875 – Rotorelemente mwN; BGH, GRUR 2016, 361 - Fugenband). Im Zweifel ist ein Verständnis des Anspruchs geboten, das beide Teile der Patentschrift nicht in Widerspruch zueinander bringt, sondern sie als aufeinander bezogene Teile der dem Fachmann mit dem Patent zur Verfügung gestellten technischen Lehre als eines sinnvollen Ganzen versteht (BGH, GRUR 2015, 875 Rn 16 – Rotorelemente). Mit Blick auf die oben erfolgten Ausführungen zum Wortlaut des Merkmals 2.2 lässt sich die Definition hier zwanglos mit dem Anspruch in Einklang bringen, so dass beide eine unauflösbare Einheit bilden.
116(2)
117Weiterer Beleg für das Erfordernis einer (nahezu) vollständigen Entkopplung ist der Absatz [0040] des Klagepatents, welcher exakt das Begriffsverständnis des Standes der Technik übernimmt. In diesem heißt es u.a.:
118„Die Detektionsmasse folgt aufgrund des eingeschränkten Freiheitsgrads nur der durch die Corioliskraft induzierten Bewegung. Im Idealfall ist sie vom Mode der Antriebsmasse entkoppelt, d.h. sie kann deren oszillatorischer Primärbewegung nicht folgen.“
119Aus dieser Passage lässt sich rückschließen, dass eine Entkopplung dann nicht erfolgt, wenn die Detektionsmasse der Primärbewegung der Antriebsmasse folgt. Dies gilt für jedes - mithin auch ein etwaig nur vermindertes - Folgen der Primärbewegung. Zwar spricht diese Passage von einem „Idealfall“. Dies veranlasst jedoch nicht zu der Annahme, jedwede bloß geringfügige Verminderung des Folgens sei schon klagepatentgemäß. Vielmehr sieht der Fachmann neben diesem „Idealfall“ in der Zusammenschau mit dem Absatz [0017] des Klagepatents nur Konstellationen erfasst, in denen die Detektionsmasse der Primärbewegung der Antriebsmasse nahezu gar nicht folgt, mithin die Übertragung der Bewegungsenergie nahezu null beträgt.
120Soweit die Klägerin demgegenüber das Augenmerk auf nachstehenden Inhalt des Absatzes [0040] lenkt, verfängt dies nicht.
121„… durch die Transfeder 6 … die Bewegung des Antriebselements teilweise auf das Detektionselements übertragen, wobei das Ausmaß dieser Übertragung von den Eigenschaften der Transferfeder bestimmt wird“…“
122In diesem Zusammenhang vergegenwärtigt sich der Fachmann nämlich Folgendes:
123Weil sich die postulierte „teilweise Entkopplung“ - wie bereits erwähnt - nicht auf die Massen selbst, sondern auf die Schwingungsmoden bezieht, kann die geforderte Entkopplung auch in der Weise erzielt werden, dass zwar die entkoppelte Schwingung auf die jeweils andere Masse übertragen wird, jedoch alsdann anderweitige Maßnahmen dafür Sorge tragen, dass es dort nicht zu einer Schwingung kommt. Dies kann beispielsweise in der Weise erfolgen, dass eine starre Aufhängung der betreffenden Masse erfolgt. Diese Art und Weise einer Entkopplung wird mehrfach im Absatz [0008] des Klagepatents beschrieben: Dort wird z.B. erläutert, dass die Entkopplung einer Masse mittels deren Aufhängung derart erfolgt, dass sie nur einen einzigen Bewegungsfreiheitsgrad besitzt. Ebenso wird a.a.O. eine entsprechende Aufhängung einer Masse erwähnt, die verhindert, dass sie aus der x-y-Ebene verkippt bzw. ausgelenkt werden kann. Wie das Landgericht richtig angemerkt hat, steht der Maßgeblichkeit des Absatzes [0008] des Klagepatents für die Auslegung des Anspruchs 1 nicht etwa entgegen, dass es sich hierbei um Schilderungen des vorbekannten Standes der Technik handelt; insoweit gilt das soeben zum Absatz [0017] Ausgeführte entsprechend. Es ist unter Berücksichtigung des Gesamtinhalts der Patentschrift nicht zu erkennen, dass das Klagepatent die Ausführungen im Rahmen des Absatzes [0008] des Klagepatents bloß als „formalen Aufhänger“ referiert und etwa die dort beschriebene Aufhängung einer Masse als Entkopplungsvariante aufgeben wollte. Dagegen spricht bereits, dass das Klagepatent in seinem Absatz [0009] Vorteile in Bezug auf die im vorhergehenden Absatz beschriebenen Varianten (einer Entkopplung) ausmacht: Mit der ersten Variante (mit Aufhängung der ersten Masse) verbindet das Klagepatent den Vorteil, dass die Detektion der Auslenkung und damit der Drehrate nur wenig beeinflusst von der Antriebs-Drehbewegung gemessen werden kann. Für die zweite Variante (mit Aufhängung der zweiten Masse) betont das Klagepatent den Vorteil, dass mangels Verkippung die Antriebsleistung der Antriebsmasse nicht verschlechtert werde. Für vorstehendes Verständnis spricht ferner das im Absatz [0040] des Klagepatents selbst geschilderte Ausführungsbeispiel. Denn auch dort wird neben einer Entkopplung (dort: der Primärschwingung) mittels Nichtübertragung explizit als Variante eine starre Aufhängung der Detektionsmasse beschrieben. Dies belegt ebenfalls, dass das Klagepatent die Art und Weise der Entkopplung gerade nicht abschließend vorgibt, sondern es dem Fachmann überlässt, ob er selbige durch eine Nichtübertragung der Schwingung oder auf eine andere technisch geeignete Art und Weise erreichen möchte bzw. durch ein kumulatives Wirken beider Varianten.
124Letzteres findet sich etwa am Ende des Absatzes [0013] des Klagepatents, wo beschrieben ist, dass der Primärschwinger in seiner Ebene bleibt (mithin nicht verkippt), weil er zum einen so am Substrat verankert ist, dass ein Verkippen aus dieser Ebene heraus nicht gut möglich ist und zum anderen die Torsionsfedern eine Rückübertragung der auf den Sekundärschwinger einwirkenden Corioliskraft auf den Primärschwinger verhindern. Mithin bedeutet der Umstand, dass im Einzelfall eine denkbare Maßnahme nur zu einer verminderten Übertragung führt, nicht etwa, dass allein dies schon eine Entkopplung im Sinne des Klagepatents wäre, sondern es ist zu beachten, dass der (nahezu) vollständige Ausschluss der Übertragung der Bewegungsenergie noch im Zusammenwirken mit einer weiteren Maßnahme erfolgt.
125Ein weiteres Beispiel für ein derartiges kumulatives Zusammenwirken zweier verschiedener Maßnahmen findet sich auch im Absatz [0054] des Klagepatents. Dort ist zunächst von einer schon wesentlichen Entkopplung durch Verbindungsmittel die Rede. Gleichwohl merkt das Klagepatent a.a.O. an, dass zusätzlich ein Rückstellelement auf die innere Masse einwirken sollte, so dass auch das zum Teil übertragene Kraftmoment der Ringschwingung unterdrückt bzw. kompensiert wird.
126(3)
127Es ist der Klägerin auch nicht gelungen, anderweitige Beschreibungspassagen aufzuzeigen, die ein abweichendes Verständnis von „entkoppelt“ gebieten. Dies gilt namentlich für den von ihr ins Feld geführten Absatz [0033] des Klagepatents, der an zwei Stellen von einer „Verminderung“ der Verkippung spricht. Die betreffenden Passagen befassen sich mit der Funktion der Verbindungselemente, die für die besagte Verminderung sorgen. Wiederum gilt es zu beachten, dass die Entkopplung nicht allein durch die Verbindungselemente gewährleistet werden muss, sondern kumulativ andere Maßnahmen (z.B. Federn) hinzutreten können. Auch hieraus lässt sich folglich nichts dahingehend ableiten, dass der Grad der Entkopplung klagepatentgemäß auch insgesamt bloß vermindert sein dürfe.
128(4)
129Vorstehendes gilt entsprechend für die Unteransprüche 4 und 5, welche die im Absatz [0033] des Klagepatents geschilderten Ausführungsbeispiele verkörpern. Unteransprüche lassen regelmäßig - vorbehaltlich rein additiver Elemente - den Schluss zu, dass dasjenige, was in ihnen beschrieben ist, auch unter den Hauptanspruch fällt (BGH, GRUR 2016, 1031 - Wärmetauscher).
130Dass beide genannten Unteransprüche neben einem Verhindern eines Verkippens der Antriebs- bzw. Detektionsmasse auch dessen bloße Verminderung vorsehen, legitimiert wiederum nicht den Schluss, auch eine unvollständige Entkopplung sei klagepatentgemäß. Während der Unteranspruch 4 u.a. eine Verminderung der Verkippung des Antriebselements aufgrund von Verbindungselementen lehrt, vermindern (oder verhindern) die Verbindungselemente im Unteranspruch 5 eine Übertragung der Schwingung des Antriebselements auf das Detektionselement. Beide Unteransprüche befassen sich nicht in genereller Weise mit dem zulässigen / erforderlichen Ausmaß der Entkopplung, sondern betreffen allein den Beitrag der Verbindungselemente zum in den Unteransprüchen gar nicht thematisierten „Gesamtergebnis“ Entkopplung, ohne auszuschließen, dass additive Maßnahmen für die insgesamt notwendige (nahezu) vollständige Entkopplung sorgen. Aus ihnen ist daher keineswegs rückzuschließen, dass der Anspruch 1 bloß verminderte Übertragungen als zureichende Entkopplung erachtet.
131(5)
132Entsprechendes gilt auch für den Unteranspruch 15, soweit dieser eine Ausbildung der Verbindungselemente lehrt, die zu einer nur teilweisen Übertragung auf die Detektionsmasse führt. Auch dieser vermag daher das Verständnis der Klägerin von einer erfindungsgemäßen Entkopplung nicht zu stützen.
133(ccc)
134Ebenso wenig durchzudringen vermag im Ergebnis der Hinweis der Klägerin auf den Sinn und Zweck der Entkopplung. Richtig ist zwar, dass es für das Verständnis eines Merkmals entscheidend auf dessen technische Funktion ankommt, die es für sich und im Zusammenwirken mit den übrigen Merkmalen des Patentanspruchs bei der Herbeiführung des erfindungsgemäßen Erfolgs hat (BGH, GRUR 2012, 1124 Rn 27 m.w.N. - Polymerschaum). Wie bereits ausgeführt, soll die Entkopplung hinsichtlich der Primärschwingung ein höheres Signal-/Rauschverhältnis und hinsichtlich der Sekundärschwingung eine verbesserte Antriebsleistung bereitstellen. Es leuchtet dem Fachmann unmittelbar ein, dass diese Vorteile (vgl. Absatz [0009] des Klagepatents) im Falle einer mehr als geringfügigen Übertragung einer Schwingungsmode nicht erzielbar wären. Soweit der Absatz [0008] des Klagepatents davon spricht, dass die Kopplung zwischen den beiden Massen „idealerweise“ so sei, dass die Rotationsschwingung nicht auf die zweite Masse oder das zweite Element übertragen werde, kann dies aus oben angeführten Gründen nicht so gemeint sein, dass jedwede Abweichung vom Ideal auch noch klagepatentgemäß sei. Auch im Lichte der eingangs geschilderten Aufgabe der Erfindung bedarf es einer (nahezu) vollständigen Entkopplung. Das Klagepatent widmet sich insoweit den Problemen einer Vorverkippung der beweglichen Teile aus der waagerechten Ruhelage (vgl. Absatz [0024] des Klagepatents) und dem sog. „Sticking“ von beweglichen Sensorelementen (vgl. Absatz [0027] des Klagepatents). In diesem Zusammenhang diskutiert das Klagepatent zunächst als vermeintliche Lösung eine Erhöhung der Rückstellkräfte (z.B. mittels breiterer Federn), bemerkt sodann jedoch, dass damit eine (unerwünschte) Reduzierung des Nutzsignals einhergehe (Absatz [0027] des Klagepatents). Damit lehnt das Klagepatent eine (z.B. aufgrund stärkerer Federn) verminderte Entkopplung der Antriebs- und Detektionsmasse vom Klagepatent gerade ab. Zentrales Lösungsmittel gemäß der technischen Lehre des Klagepatents sind vielmehr die im Merkmal 5 gelehrten Außenanker.
1352.2
136Nach alledem kommt der Begriff „entkoppelt“ in Verbindung mit der Legaldefinition im Absatz [0017] des Klagepatents einer Zahlenangabe des Inhalts gleich, dass die übertragene Bewegungsenergie (nahezu) null betragen muss. Im Einklang mit dem vorbekannten Stand der Technik versteht das Klagepatent solche Systeme als „mechanisch entkoppelt“, bei denen es im Ergebnis dazu kommt, dass eine Schwingungsmode der anderen Schwingungsmode nicht folgt und es deshalb nicht zu einem Verkippen beider Massen kommt.
137Dies vorausgeschickt lässt sich eine wortsinngemäße Verwirklichung des Merkmals 2.2 auf der Basis der primären Verletzungsargumentation der Klägerin nicht tatrichterlich feststellen. Dies gilt ganz unabhängig von der Frage, ob das gesamte zweitinstanzliche Vorbringen der Klägerin überhaupt berücksichtigungsfähig ist. Denn nach dem eigenen Vorbringen der Klägerin soll die Auslenkung der Antriebsmasse am Ort der zentralen Koppelfeder sogar noch 90 % der Auslenkung der Detektionsmasse betragen. Damit ist die Antriebsmasse zwar in der Sekundärmode daran gehindert, genauso stark auszuschwingen wie die Detektionsmasse. Mit einer (nahezu) vollständigen Entkopplung im vorbeschriebenen Sinne hat das allerdings ersichtlich nichts gemein. Selbst wenn man es zugunsten der Klägerin zusätzlich als wahr unterstellt, dass der Unterschied der Verkippungen bei Betrachtung des dynamischen Verhaltens der Massen im Betrieb „noch erheblich größer sei“, ergibt auch das längst noch keine Verhältnisse, bei denen der Betrag der übertragenen Bewegungsenergie gegen null tendiert. Nach eigener Behauptung der Klägerin soll der Amplitudenunterschied nämlich auch im Betrieb „nur“ ein Mehrfaches der aufhängungsbedingten 10 % betragen. Dass der Unterschied gar (nahezu) das Zehnfache im Vergleich zum Ruhezustand betrage, macht die Klägerin selbst nicht geltend.
1383.
139Die angegriffenen Ausführungsformen machen auch auf der Basis der hilfsweisen Verletzungsargumentation der Klägerin („Beating Heart“-Design, s. im Detail S. 12 ff. der erstinstanzlichen Triplik) keinen Gebrauch von der technischen Lehre des Anspruchs 1 des Klagepatents, weil sich nicht tatrichterlich feststellen lässt, dass die angegriffenen Ausführungsformen in der Lage sind, die Merkmale 3 und 4 des Anspruchs 1 gleichzeitig zu verwirklichen.
140Nach dem Merkmal 3 wird die Drehung Ω dadurch detektiert, dass eine Verkippung der Detektionsmasse aus der Flächenebene der Antriebs- und Detektionsanordnung heraus detektiert wird. Das Merkmal 4 verlangt, dass diejenige der beiden Massen, die einen größeren Abstand zu dem genannten Zentrum aufweist, unter der Einwirkung von Corioliskraft aus der genannten Flächenebene heraus verkippen kann.
141a)
142Ein Vorrichtungsanspruch setzt voraus, dass sämtliche Merkmale des Anspruchs erfüllt werden, d. h. die angegriffene Vorrichtung muss aufgrund ihrer räumlich-körperlichen Ausgestaltung objektiv geeignet sein, sämtliche erfindungsgemäßen Vorgaben zu verwirklichen. Die angegriffene Sensoranordnung muss folglich so ausgestaltet sein, dass sie die nach der Erfindung vorgesehene Detektion mit den Mitteln sowie nach Art und Weise der technischen Lehre des Klagepatents ausführen kann. Da die Merkmale 3 und 4 nicht etwa in einem Alternativverhältnis zueinander stehen, sondern unterschiedliche Gegenstände – einerseits Verkippung der Detektionsmasse als „das Mittel“ der Detektion (Merkmal 3) und andererseits Verkippung der mit größerem Abstand angeordneten Masse (Merkmal 4) – betreffen, müssen sie im Hinblick auf das Bezugsobjekt des anspruchsgemäßen Drehratensensors beide gegeben sein. Dass das Landgericht im patentrechtlichen Ansatz folglich zutreffend davon ausging, dass es für die Frage der Benutzung der technischen Lehre des Vorrichtungsanspruchs 1 zwingend auf eine mögliche gleichzeitige Verwirklichung der Merkmale 3 und 4 des Vorrichtungsanspruchs 1 ankommt, stellt die Klägerin mit ihrer Berufung zu Recht selbst nicht in Abrede. Weitere Ausführungen des Senats sind zu diesem Aspekt daher nicht angezeigt.
143b)
144Das Landgericht hat sich aufgrund folgender Feststellungen nicht von einer entsprechenden objektiven Eignung der angegriffenen Ausführungsformen überzeugen können:
145Die Klägerin kombiniere in ihrer hilfsweisen Argumentation den „Roll Mode“, in dem die (hilfsweise) Antriebsmasse verkippen kann, mit dem „Pitch Mode“, in dem die (hilfsweise) Detektionsmasse verkippen kann. In der nachfolgend eingeblendeten Abb. 7 der Triplik wird die Verkippbarkeit der jeweiligen Massen durch abgestufte Farben dargestellt:
146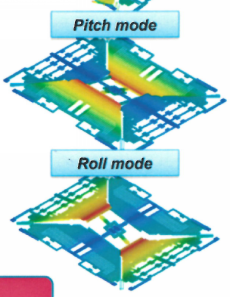
147Gemäß dem Vortrag der Klägerin verkippt im „Roll Mode“ nur die (hilfsweise) Antriebsmasse, weshalb es in diesem Modus - so das Landgericht - an der Verwirklichung von Merkmal 3 fehle. Denn eine Verkippung der (hilfsweisen) Detektionsmasse finde dort nicht statt, so dass auch keine „Verkippung der Detektionsmasse aus der Flächenebene“ detektiert werden könne.
148Im „Pitch Mode“ - so das Landgericht weiter - verkippe zwar die (hilfsweise) Detektionsmasse, jedoch könne insoweit eine Verwirklichung von Merkmal 4 nicht festgestellt werden. Es sei nämlich nicht ersichtlich, dass im „Pitch Mode“ die weiter vom Zentrum entfernte Masse verkippen könne, da die Klägerin schon nicht hinreichend vorgetragen habe, um welche der Massen es sich hierbei handeln solle: Sollte die (hilfsweise) Antriebsmasse weiter entfernt vom Zentrum angeordnet sein, sei die Verwirklichung von Merkmal 4 für die Kammer nicht feststellbar, weil die Verkippung dieser (Antriebs-) Masse nach dem Vortrag der Klägerin nur im „Roll Mode“ erfolge.
149aa)
150Auch mit der Berufung hat die Klägerin dem Senat keinen Vortrag unterbreitet, der ihm die tatrichterliche Feststellung erlaubt, dass die angegriffenen Ausführungsformen die objektive Eignung aufweisen, die technischen Vorgaben der Merkmale 3 und 4 in anspruchsgemäßer Weise gleichzeitig zu verwirklichen.
151Mit ihrer Berufung bringt die Klägerin in diesem Kontext im Wesentlichen Folgendes vor: Entgegen den Feststellungen im LGU verkippten Detektionsmasse und Antriebsmasse „in der Regel“ gleichzeitig. Der streitgegenständliche Sensor sei nämlich in der Lage, Roll-, Nick- und Gierbewegungen gleichzeitig zu erfassen, was vor allem in der Luftfahrtindustrie eine Rolle spiele. Die angegriffenen Ausführungsformen seien geeignet, beliebige Sensordrehungen im dreidimensionalen Raum gleichzeitig zu detektieren. Dies hat die Klägerin anhand folgender Abbildung näher beschrieben:
152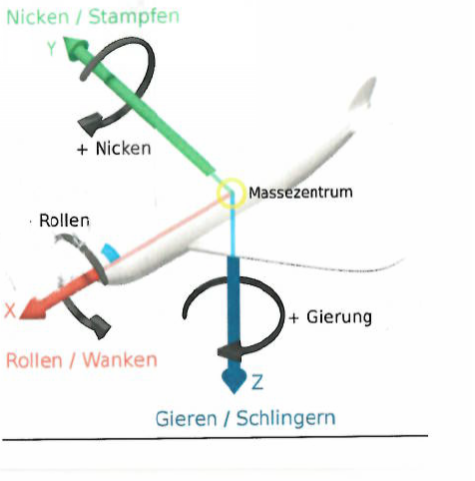
153Im Roll Mode - so die Klägerin - werde von der Drehung die Komponente entlang der Achse erfasst, die in der betreffenden Abbildung als X-Achse bezeichnet ist und zwar über eine durch die (unmittelbare) Einwirkung von Corioliskraft ausgelöste Verkippung der Antriebsmasse. Diese Masse fungiere also insoweit zugleich als Detektionsmasse. Im Pitch Mode (Erfassung von Drehkomponenten entlang der y-Achse) werde zwar die Antriebsmasse (praktisch) nicht verkippt, dafür aber die Detektionsmasse. In der Praxis detektierten die angegriffenen Ausführungsformen - unstreitig - gleichzeitig alle drei Moden (Yaw, pitch und Roll) - ein einzelner Modus trete nur unter Laborbedingungen auf - , so dass es zwangsläufig zu einer gleichzeitigen Verwirklichung der Merkmale 3 und 4 komme.
154bb)
155Entgegen der Auffassung der Klägerin lässt auch dieses Vorbringen nicht die Annahme einer gleichzeitigen Verwirklichung der Merkmale 3 und 4 zu.
156aaa)
157Wie sich aus dem Merkmal 3 ergibt, soll die Drehung gerade dadurch detektiert werden, dass die Verkippung der Detektionsmasse aus der Flächenebene der Antriebs- und Detektionsanordnung heraus detektiert wird. Das Merkmal 3 rekurriert auf das Merkmal 1, welches den Zweck der gelehrten Detektionsanordnung dahingehend beschreibt, dass sie zur Detektion einer Drehung Ω, um die der Sensor gedreht wird, dient. Die Bedeutung der damit verbundenen Zweckangabe erschöpft sich darin, dass sie die Eignung der gelehrten Vorrichtung zum genannten Zweck vorgibt (vgl. BGHZ 112, 140, 155 f. - Befestigungsvorrichtung II; BGH GRUR 2010, 1081 - Bildunterstützung bei Katheternavigation). Dass mit ihr weitergehende Anforderungen verbunden sind, welche nicht ohnehin in den weiteren Merkmalen zum Ausdruck kommen, ist - jedenfalls im Zusammenhang mit der hier zu klärenden Frage - nicht ersichtlich.
158Das Merkmal 1 ist insofern missverständlich formuliert, als dass eine Drehung Ω, um die der Sensor gedreht wird, detektiert werden soll. Bei technisch sinnvollem Verständnis erkennt der Fachmann, dass tatsächlich nur eine Drehung um eine Achse gemeint sein kann, um die der Sensor gedreht wird - und nicht etwa die „Drehung um eine Drehung“. Bezugsobjekt des Drehratensensors ist die in Merkmalen 1 und 3 genannte „eine“ (= Singular) bzw. „die Drehung Ω“ (= bestimmter Artikel), unter welcher der Fachmann eine Drehung um eine Achse versteht, weshalb es nicht genügt, wenn das eine Merkmal (z.B. Merkmal 3) nur in Bezug auf eine mögliche Drehachse und das andere Merkmal (z.B. Merkmal 4) nur in Bezug auf eine andere mögliche Drehachse erfüllt wird. Dies erhellt sich dem Fachmann spätestens bei Lektüre des Absatzes [0006] des Klagepatents, welcher anlässlich der Erläuterung des allgemeinen Funktionsprinzips eines rotatorischen Vibrationsgyroskops beschreibt, dass (beispielhaft) eine Drehung um die X-Achse gemessen wird. In diesem Zusammenhang differenziert das Klagepatent zwischen Input-, Drive- und Sense-Achsen (vgl. Absatz [0012] des Klagepatents und die zugehörige Tabelle 1). Die zu detektierende Drehachse ist die „Input-Achse“. Die Drive-Achse ergibt sich aus der Bewegungsrichtung des Primär- oder Antriebsmode, welcher entweder eine translatorische oder eine rotatorische Bewegung sein kann. Die Sense-Achse liegt in der Regel senkrecht zu den beiden anderen Achsen. Das Klagepatent verwendet für die Bezeichnung der Achsen in Bezug auf einen planar gefertigten Sensor auch die Platzhalter X, Y und Z, wobei X und Y in der Sensorebene liegen und Z senkrecht zu dieser Bauteilebene liegt (s. [Abs. 0012] des Klagepatents, Zeilen 18 f.]).
159In ähnlicher Weise geht auch aus dem Absatz [0008] im allgemeinen Beschreibungsteil des Klagepatents hervor, dass der gelehrte Drehratensensor die Drehrate „einer“ Achse messen soll:
160„In einer ersten Variante wirkt dann, wenn beispielsweise eine Drehbewegung Ω des Sensors um eine Achse senkrecht zur Schwingungsebene auftritt…“.
161Wie sich überdies der bereits erwähnten Tabelle 1 im Absatz [Abs. 0012] des Klagepatents entnehmen lässt, waren im Stand der Technik bereits verschiedenste Konstellationen bekannt, wobei meist entweder die X-Achse oder die Z-Achse als Input-Achse (= Detektionsachse) dienten. Die unter anderem vom Klagepatent erwähnte US5895850 kannte zwei Input-Achsen, nämlich die X-Achse und die Y-Achse. Letzteres mag darauf hindeuten, dass schon der Stand der Technik eine Mehrheit von Input-Achsen kannte und eine solche Ausgestaltung - mangels irgendeiner insoweit erkennbaren Kritik des Klagepatents - auch der technischen Lehre des Klagepatents immanent ist. Insofern kann zugunsten der Klägerin daher angenommen werden, dass ein klagepatentgemäßer Drehratensensor in Bezug auf die mögliche Input-Achse keineswegs festgelegt ist, sondern nach fachmännischen Belieben einer der drei Achsen (X, Y oder Z) als solche fungieren mag und überdies die technische Lehre des Klagepatents es nicht ausschließt, dass zumindest zwei (oder alle drei) der Achsen als Input-Achse in Betracht kommen und gleichzeitig detektiert werden können. Dafür spricht nicht zuletzt, dass das Klagepatent ausweislich seines Absatzes [0003] als potentielles Einsatzgebiet für klagepatentgemäße Vorrichtungen unter anderem den Flugzeugbau nennt und es beim Einsatz von Flugzeugen - unstreitig - zu komplexen Bewegungen im Raum kommen kann, die sich durch simultane Bewegungen des Flugzeugs in mehrere Richtungen im dreidimensionalen Raum auszeichnen.
162Bei der Auslegung der Merkmale 3 und 4 ist gleichwohl im Blick zu behalten, dass die Merkmale eines Patentanspruchs eine Einheit bilden mit der Folge, dass einzelne Merkmale nicht losgelöst vom Gesamtzusammenhang ausgelegt werden dürfen (BGH GRUR 2012, 1124 - Polymerschaum). Auch wenn das Klagepatent gemäß den vorstehenden Ausführungen Lösungen umfassen mag, bei denen simultan Drehungen um verschiedene Drehachsen detektiert werden können, darf nicht außer Acht bleiben, dass der Anspruch 1 die Vorgaben in den Merkmalen 2 bis 4 gerade in Bezug auf die eine im Merkmal 1 genannte zu detektierende Drehung Ω ausrichtet. Nach dem Merkmal 2 befinden sich die Antriebs- und die Detektionsanordnung in der X-Y-Ebene oberhalb der Substratfläche. Die Detektionsmasse, deren Verkippung aus der Flächenebene ausweislich Merkmal 3 „Messgrad“ für die Detektion der Drehung ist, ist symmetrisch um das Zentrum der Detektionsanordnung angeordnet (Merkmal 2). Diejenige Masse mit dem größten Abstand zum genannten Zentrum muss unter Einwirkung von Coriolis-Kraft verkippen (Merkmal 4). Wenn mehrere Input-Achsen detektiert werden, müssen die Merkmale 2 bis 4 des Anspruchs 1 zumindest in Bezug auf eine der mehreren detektierten Achse für sich betrachtet („isoliert“) erfüllt sein. Ein „Zusammenfügen“ von Einzelmerkmalen, die nicht kumulativ in Bezug auf mindestens eine einzelne Input-Achse vorliegen, sondern von denen einzelne nur in Bezug auf eine Drehachse und andere wiederum nur in Bezug auf eine (oder mehrere) andere Drehachsen erfüllt sind, ist hingegen nicht anspruchsgemäß.
163Insbesondere ergibt sich aus der Inbezugnahme der US 5895850 als Stand der Technik kein Anhalt dafür, dass die technische Lehre des Klagepatents nicht für jede zu detektierende Drehachse das Vorliegen sämtlicher Merkmale des Anspruchs 1 des Klagepatents erfordert. Eine konkrete Auseinandersetzung mit dieser Druckschrift erfolgt nicht im Klagepatent. Namentlich werden etwaige mehrfache Input-Achsen nicht thematisiert. Erst recht gibt es im Klagepatent keinen positiv formulierten Hinweis darauf, dass es ausreichend sei, die Vorgaben der Merkmale 3 und 4 auf mehrere Drehachsen „aufzuteilen“. Abgesehen davon wird in der US 5895850. laut Tabelle 1 des Klagepatents als Input-Achse nicht eine Achse mit mehreren Komponenten genannt, sondern es geht insoweit um mehrere Input-Achsen.
164Im Einklang mit der Beschreibung des allgemeinen Funktionsprinzips stellt die Klagepatentschrift auch bei der Darstellung bevorzugter Ausführungsbeispiele des Anspruchs 1 stets auf „eine“ zu detektierende Drehung bzw. Drehachse ab. So heißt es bspw. in Absatz [0023] mit Blick auf Figur 5: „ …, die sich bei einer Drehbewegung des Sensors um die eine Achse X in Y-Richtung neigt…“. In Absatz [0033] des Klagepatents, der die Unteransprüche 4 und 5 betrifft, wird ausgeführt, dass „(ii) eine Detektionsmasse umfasst, die sich bei Einwirkung einer um die x-Achse erfolgenden Drehung Ω auf den Drehratensensor ….“.
165Schließlich gebietet auch die technische Funktion der in Rede stehenden Merkmale 3 und 4 kein anderes Verständnis. Es ist nicht ersichtlich und auch von der Klägerin nicht dargetan, dass es – wenn es mehrere Input-Achsen gibt – gar notwendig und/oder auch nur ausreichend wäre, nur das Merkmal 3 oder nur das Merkmal 4 zu verwirklichen. Die Detektion der Drehung Ω erfolgt durch Messung der Verkippung der Detektionsmasse (Merkmal 3). Um diese Verkippung messen zu können, muss diejenige Masse mit dem größeren Abstand zum Zentrum unter Einwirkung der Corioliskraft verkippbar sein (Merkmal 4). Die beiden Merkmale stehen folglich im Zusammenhang miteinander und werden funktional beide zur Messung benötigt. Es ist daher nicht ersichtlich, dass nach der technischen Lehre des Anspruchs 1 auf eine der beiden Vorgaben in Bezug auf eine Input-Achse verzichtet werden könnte.
166In Fortführung dieser Annahmen ist dem Klagepatent auch kein Anhalt dafür zu entnehmen, dass in einem Fall, in dem „eine“ Drehung aus mehreren Achsen-Komponenten besteht, es genügen würde, dass hinsichtlich der einen Komponente das Merkmal 3 und hinsichtlich einer anderen Komponente das Merkmal 4 erfüllt ist. Auch wenn eine Drehung mit mehreren Achsenkomponenten ggfs. die Regel darstellen sollte und dem Fachmann dies geläufig wäre und er folglich davon ausginge, dass eine Drehung exakt um eine Achse „nur unter Laborbedingungen“ stattfindet, muss er zur Kenntnis nehmen, dass das Klagepatent gleichwohl hinsichtlich der zu detektierenden Drehung bzw. Drehachse nicht weiter differenziert. Das Klagepatent befasst sich insbesondere an keiner Stelle mit etwaigen Mischkomponenten, sondern geht als Bezugsobjekt stets – wie dargetan – von „einer“ Drehachse aus. Es enthält demzufolge auch keinen Anhaltspunkt für eine Aufteilung/Alternativität der Merkmale in Bezug auf etwaige einzelne Komponenten „einer“ Drehung.
167bbb)
168Nach dem - unbestrittenen - Vortrag der Klägerin (vgl. S. 20 Berufungsbegründung unten) kann die angegriffene Ausführungsform gleichzeitig alle drei Moden (Yaw, Pitch und Roll) detektieren. Das sind insgesamt drei Drehungen, nämlich jeweils eine um die X-, die Y- und die Z-Achse.
169Im Rahmen ihrer hilfsweisen Verletzungsargumentation anhand des Beispiels auf S. 19 f. der Berufungsbegründung stellt die Klägerin insbesondere auf gleichzeitige Drehratendetektionen im Roll- und im Pitch-Mode ab. Die Klägerin bezieht sich folglich auf einen Sachverhalt, bei dem zwei simultane Detektionen erfolgen. Im einen Modus (Roll-Mode“) verkippt nur die Antriebsmasse, während im anderen Modus („Pitch-Mode“) nur die Detektionsmasse verkippt. Die gleichzeitige Verwirklichung der Merkmale 3 und 4 ist folglich nur bei kumulativer Betrachtung beider Modi gegeben, nicht jedoch - wie anspruchsgemäß erforderlich - bei isolierter Betrachtung einer einzigen input-Achse.
170Ob das Klagepatent eine Lösung erfasst, bei der nicht nur gleichzeitig zwei oder mehr Drehungen um zwei oder mehr Input-Achsen detektiert werden, sondern eine einzige Detektion einer Drehung um eine Achse erfolgt, die für sich schon Mischkomponenten aller drei Moden aufweist, bedarf daher vorliegend nicht einmal einer abschließenden Entscheidung. Denn es lässt sich dem Vortrag der Klägerin nicht entnehmen, dass gerade solches bei den angegriffenen Ausführungsformen der Fall ist. Sofern ihr betreffender Vortrag in der Berufungsbegründung allerdings so zu verstehen sein sollte, dass „eine“ Drehung mit Komponenten aller drei Moden erfasst sein sollte, ergäbe sich auch daraus bloß, dass hinsichtlich der einen Komponente das Merkmal 3 und hinsichtlich einer anderen Komponente das Merkmal 4 erfüllt wäre. Solches wäre aus den oben genannten Gründen vom Anpruch 1 des Klagepatents nicht erfasst.
171III.
172Die Kostenentscheidung folgt aus § 97 Abs. 1 ZPO.
173Die Entscheidung zur vorläufigen Vollstreckbarkeit findet ihre Grundlage in §§ 708 Nr. 10, 711 ZPO.
174Es bestand keine Veranlassung, die Revision zuzulassen, weil die hierfür in § 543 ZPO aufgestellten Voraussetzungen ersichtlich nicht vorliegen. Als reine Einzelfallentscheidung hat die Rechtssache weder grundsätzliche Bedeutung im Sinne des § 543 Abs. 2 Nr. 1 ZPO noch erfordern die Sicherung einer einheitlichen Rechtsprechung oder die Fortbildung des Rechts eine revisionsgerichtliche Entscheidung im Sinne des § 543 Abs. 2 Nr. 2 ZPO.
175Streitwert der Berufungsinstanz: EUR 250.000,- (Berufung nur in Bezug auf eine der zwei erstinstanzlichen Beklagten)

